
 日本語
日本語









大量生産、自動化およびロボット工学による超音波溶接のための効率的な方法
オートメーションプロセスは継続的に速いサイクルタイム、プロセスのより厳しい許容範囲を探し、信頼性の向上を探しています。 プリロード 超音波溶接ユニットは、限界を押すもう1つのステップです。
大量生産のための自動化方法、コンポーネントの柔軟な生産、または複数の機能の組み合わせ、さまざまな技術やアプローチを要求に応えるために選択できます。 一般的に使用されている技術 CAM駆動 高いスループットのためのシステム、そしてより経済的で新しい機会や分野を生み出しているロボット。
超音波溶接によって提供される高処理速度は、初期投資にもかかわらず、大量生産にとって非常に魅力的になる。 このプロセスでは、電圧から発生した超音波振動は、定義された接合点でプラスチックを正確に溶融し、均質な接合を作成します。 60サイクルまでのサイクルタイム80から 450の間の必要な溶接時間に応じて、分を実現することができます。 ミリ秒。 冷たい溶接工具はaを必要としない一定の温度を維持する必要なしに、任意のときに任意の時期に運転準備ができています。 善と深い予備的アプリケーションコンサルティングは不可欠です。 この 実現するためにコンポーネント設計に特に適用可能です。接合中の超音波振動の集束
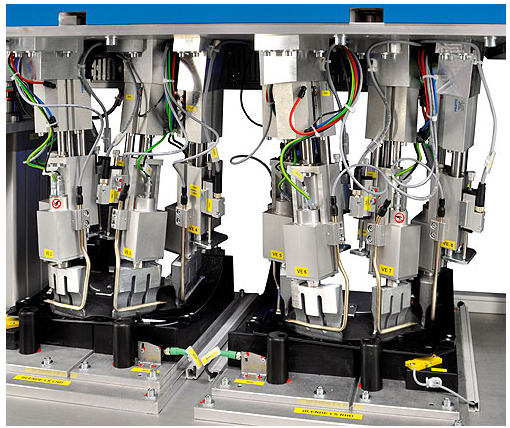
プリロード 超音波溶接システム
プリロード シリンダーがすでに拡張されていることを意味しますインテリジェント空気圧システム 溶接工具は 材料と接触します。 そのため、直ちに溶接を開始することができる。 多くの溶接スポットを持つアプリケーションに保存されている時間は大きいかもしれません。 最大20個の溶接スポットを有するエンジンコンパートメント用の音響フォームの接合は、ロボットによってますます頻繁に実現される例である。 この場合、時間の節約 アプリケーションは20秒ほど数秒です。
より詳細には、aプレロード システムはプライマリドライブ(CAM、サーボ、ロボットなど)で構成されています。そして二次的な空気圧。 二次駆動装置では、アクチュエータの空気圧シリンダに連続的に圧力がかかる。 これにより、アクチュエータのシリンダが延びている。 シリンダ内の圧力は、アプリケーションに必要なトリガ力に対応します。 アクチュエータは加圧状態にあり、これは「プレロードされた」と呼ばれます。 プライマリドライブが 「プリロード」に移動します。溶接部へのアクチュエータ、 Sonotrode 溶接されるプラスチック部品は、表面と接触し、アクチュエータのシリンダピストンが押されるようにシリンダの接触点を越えて移動する。 シリンダーの結果の圧力上昇が排出されます。空気圧レギュレータ (精密レギュレータまたは比例弁)シリンダ内の圧力を一貫したレベルで保つために。 端部位置に達する一次走行に続いて、トリガが開始され、溶接処理が開始される。 バッファリングされた空気圧シリンダは溶接部を行う。 必要な溶接力は、空気圧調整器または比例して定義される。 溶接後(保留時間の終点)は、プライマリによってアクチュエータ全体を溶接領域から戻す。 この旅行で、アクチュエータはその拡張に戻ります。プレロード 位置とそれから次の溶接の準備ができている。
プリロード システムは非常に大量のアプリケーションおよび同じまたは類似のプラスチック部品の繰り返し製造のためのものです。 早送り 自動回転システムまたはリニアトランスファー機が頻繁に使用されています。 これらの システムが動作させる。時刻最適化 サイクル; 彼ら その部分的にはカムコントロール そして部分的にサーボ制御され、2秒以下のサイクルタイム アセンブリ。 そのような生産システムの最も重要な目的は、この完全な削減を利用することです最後のミリ秒までの可能性があり、したがって部品を増やす。 超音波溶接プロセスが統合され、サイクルタイムのすべての要件は満たされなければなりません。 超音波溶接プロセス。プレロードと組み合わせたもの Sonotrode の劇的に縮小するコンセプト UP / ダウンします旅行時間は、何百万もの部品の信頼性の高いこの需要を満たしています。 一般に、アクチュエータはキャリッジに取り付けられており、これはカム駆動またはそのようなサーボ制御によって駆動される。直接駆動 (プライマリ シャフト)。
別の典型的な設定は自動アセンブリシステムを含む。プレロードされた 技術は空気圧でプリロードされたプライマリシャフトを引き起こします。旅行するアクチュエータ 溶接領域、したがってアクチュエータの空気圧駆動シリンダを加圧する。 超音波ジェネレータは、オーバーライドマシンコントローラから外部トリガ信号を受信します。 一次シャフトがその終了位置に達するとすぐに、超音波システムの溶接プロセスが HU 溶接プロセス制御が開始されました: .トリガプロセス、超音波溶接、ホールドタイムの満了後のホールドタイム、メインマシンコントローラ (PLC)準備完了信号を受け取り、プライマリシャフトをホームに戻します。 後退している間、アクチュエータはプレロードされています。端 地図。 溶接プロセスコントローラが利用可能ではなく、超音波スタートは機械コントローラ(Time 遅延)によって直接トリガされます。
マルチヘッド ソリューション
自動化内のいくつかの超音波溶接システムを使用することも可能である。 これはマルチヘッドと呼ばれます。 アプリケーション。 自動化された超音波製品が特別に開発されています。マシンは20,30、および 35kHzの周波数で利用可能です。そして最大6,200wattの出力で。ロボットにはほとんど使用できる非常にコンパクトな設計があります。 さらに、さまざまな接合アプリケーションの複雑さに簡単に適応できる新しい制御概念があり、全体的なコントロールへの簡単な統合を特徴としています。
ロボット工学
縮小の効果 製品と多数のバージョンの成長 ベクターイラスト CLIPARTO 特に自動車産業では、製品、特に製造業者がより柔軟な組み立てを探しています。 今日の 要件には、柔軟性とフロアスペースの最大化とツール変更設定の最小化が含まれます。 最新の開発は、複数のプラスチックの組み立て用のロボット工学を組み込んだ柔軟な超音波溶接セルである。 この 時間がかかるための必要性を排除やツール 変更。
そのような組み立て解の重要な特徴の1つは 6軸です。 ロボット この コンポーネントは、ARMの末尾の長さに限定されます。荷重と溶接力が考慮されます。サイジング ロボット..
2番目の主な機能は特別に設計されたものです。 2つの異なるものを利用して、溶接ヘッド(UP 4) 溶接ソノトロード ツールなしでさまざまな溶接操作に対応する。
ロボットアームに容易に軽量のコンパクトな超音波アクチュエータを取り付けることができ、したがってよく適しています。高速および低エネルギー プラスチックの結合 。 プリロード アクチュエータの空気圧シリンダーは時間を節約します。 - 1~1秒間溶接 地点 この 多くの溶接があるアプリケーションで特に顕著です。
ロボットは状況で利用されています1つのより大きなプラスチックに対していくつかの同一の溶接スポットを実行しなければならない。 ロボットセルは、非常に低いカウントと高変種で最高の柔軟性を提供します。 しかしながら、ロボットはステップバイステップを段階的に実行する。 前にロードされた コンセプト、 Sonotrode UP / ダウンします旅行時間を短縮し、ロボットの生産性が向上します。 サイクルタイムが短くなっても、達成された溶接プロセスは申し訳ありません。
再現性の高い溶接プロセスのうち、溶接距離はロボット自体によってだけでなく、アクチュエータによっても移動してはならない。 それ以外の場合は、溶接終了位置に到達した後、ロボット 次のような値でホームポジション圧力を適用する必要があります。ホールドタイム (超音波 オフ) しかし、これはできません 必要な精度で実現され、ロボット運動シーケンスの詳細なプログラミング(超音波なし位置) 義務付けられています。 解決策は常にアクチュエータを統合することです。計画オートメーション コンセプト。 このようにして、反復可能な溶接プロセスを保証することができる。 ベクターイラスト そして凝固します。
プレロードされた 技術が空気圧でロボットを引き起こします。プレロード 旅行の超音波ユニット 溶接領域、したがって、接合中のアクチュエータの空気圧駆動シリンダを加圧する。 超音波発生器はロボットから外部トリガ信号を受信するようになりました。 ロボット運動のプログラムされた終了座標に達するとすぐに、溶接プロセス制御によって監視された超音波システムの溶接プロセスが行われる。トリガプロセス、超音波溶接、ホールド。 ホールドタイムの有効期限が切れた後、ロボットは準備ができている信号を受信し、 Sonotrode 次の溶接部に直接移動する前に、数ミリメートルずつコンポーネントから外れます。 持ち上がる段階で、アクチュエータはプレロードされている。端 地図。 溶接プロセスコントローラはありません、超音波スタートはロボットコントローラ(Time 遅延)によって直接トリガされます。
他の重要な構成要素はA CNC コントローラ。これはすべての溶接プロセスと ロボットとインタフェースを制御します。 個別の最適化された溶接プログラムを各溶接位置に対して確立することができ、異なる力または振幅を使用して、異なる力を使用して個体を設定することができます。溶接プロセス制御窓。
コントローラにはイーサネットポートが装備されており、インターフェース植物ネットワークやオフサイトで直接QC 部門 Via リモート用のワールドワイドウェブ診断。 この また、ユーザーは閉ループを提供する溶接プロセスパラメータを監視および変更することもできます。データ収集と部品トラッキング。
前 :
超音波トランスデューサの医療用途次 :
超音波メスの開発 Floor 1st, Building 2#, NO.2626 Yuhangtang Road, Yuhang District
Floor 1st, Building 2#, NO.2626 Yuhangtang Road, Yuhang District
当社の製品やPRICELISTに関するお問い合わせは、私達に任せてください、そして私達は24時間以内に連絡を取ります。





© 著作権: 2026 Hangzhou Altrasonic Technology Co.,Ltd 全著作権所有

IPv6 ネットワークがサポートされています
スキャン Wechat



